DESIRE6G is entering the last phase of the project, with two large-scale demonstrators successfully integrated and operational. These demos validate the project’s key innovations and offer tangible examples of how programmable, intelligent, and distributed 6G infrastructures can support emerging mission-critical applications.
Demo 1 – Cooperative Surveillance with Augmented Reality
Status: Fully integrated across two sites within the ARNO testbed in Pisa, Italy.
Demo 1 presents a cooperative surveillance scenario combining a drone and a human operator using an augmented reality (AR) interface. A drone navigates difficult-to-reach environments, capturing real-time video with a first object detection processing. This feed is streamed to an edge computing node, where advanced AI-based processing is applied. Tasks such as object detection, pose estimation, and AR overlay generation are executed on the edge, and the resulting enhanced video is sent to the operator’s AR headset (Meta Quest 3), allowing for immersive and interactive mission control.
The operator can also interact with the system by sending real-time control commands back to the drone, creating a low-latency, closed feedback loop for dynamic mission execution.
Key 6G Innovations Demonstrated:
- Data plane programmability to optimize end-to-end traffic flows.
- Real-time network telemetry for continuous monitoring and adaptation.
- Edge orchestration for AI service deployment and management.
- Ultra-low latency networking for real-time responsiveness and operator feedback.

Technical Setup:
- Site 1 includes a drone with a programmable UE, connected to a disaggregated 5G RAN built with Benetel radio units, virtual DUs, and a core network combining Accelleran CU and Open5GS.
- The RAN is connected to an SDN-enabled transport network via a P4 Tofino switch, enabling fine-grained traffic control and telemetry.
- Site 2 hosts a Kubernetes-based edge cluster (3 nodes), linked via another hardware P4 switch to the same SDN network.
- The AR headset connects over WiFi to edge services, completing the immersive loop.
Demo 2 – Real-Time Digital Twin System for Robotics
Status: Integrated across three administrative domains within the 5TONIC testbed in Madrid, Spain.
Demo 2 demonstrates a real-time Digital Twin (DT) system for robotics, implemented across a distributed infrastructure spanning the Device-Edge-Cloud continuum. A robot dog is remotely controlled using gesture commands and operates on edge-executed algorithms. The network enables closed-loop control where sensor data from the robot is continuously transmitted upstream to update its virtual replica, while control commands are sent downstream to actuate the robot.
Operators can also interact with the system through gesture-based control, enabling intuitive human–robot collaboration.
Key 6G Innovations Demonstrated:
- Automated deployment of robotic virtual functions from the DT service
- Programmable data-plane traffic management combined with deterministic networking to prioritize mission-critical traffic, ensuring ultra-low low latency and reliable operation
- Blockchain-based service federation for dynamic and secure orchestration of robotic functions across multiple administrative domains
- AI task offloading to remote hardware accelerators for enhanced performance of robotic computer vision tasks
Technical Setup:
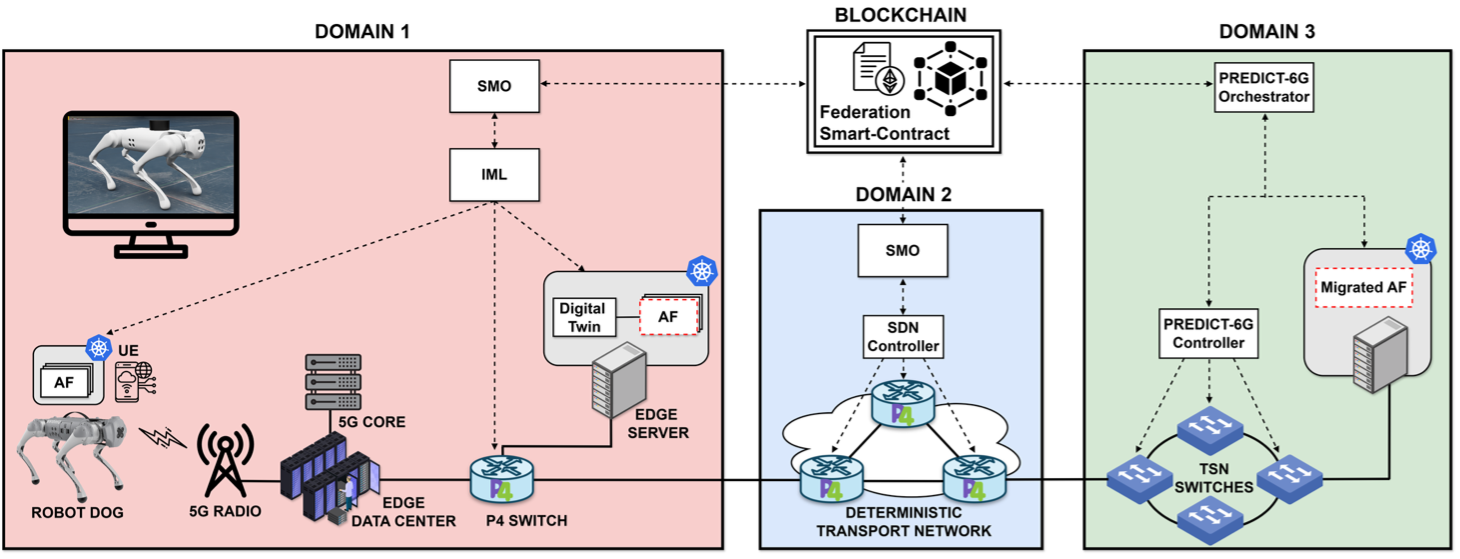
- Three interconnected domains demonstrate a multi-domain, multi-technology, 6G-enabled edge infrastructure.
- Domain 1 hosts the robot dog with an onboard miniPC connected over a 5G Standalone (SA) network. A P4 Tofino switch connects the 5G network to an edge server, forming a distributed Kubernetes cluster with the miniPC to deploy and run robotic applications.
- Domain 2 provides a deterministic transport network with SDN-controlled switches, supporting reliable communication via Packet Replication, Elimination, and Ordering Functions (PREOF)
- Domain 3 uses infrastructure from the PREDICT-6G project, featuring Time-Sensitive Networking (TSN) Ethernet switches and a single-node Kubernetes cluster where robotic applications from Domain 1 can be dynamically migrated in case of failures
Validation of DESIRE6G Architecture
These integrated demos are critical to validating the core pillars of DESIRE6G:
- AI-native, telemetry-driven orchestration across multiple infrastructure layers.
- Extreme reliability and low latency through programmable and deterministic networking.
- Seamless operation across disaggregated, federated, and multi-domain environments.
Together, they illustrate how future 6G systems can empower vertical applications in public safety, industry, robotics, and beyond, with performance guarantees and adaptability built into the infrastructure itself.
All software components are available in our public repositories, GitHub and Zenodo:
